BRA Servo Drive
- 20-150VDC 20A brushed DC servo drive.
- Single or dual encoder operation.
- Unprecedented trajectory following accuracy.
- Easy tuning with free Tuna™ software for Windows.
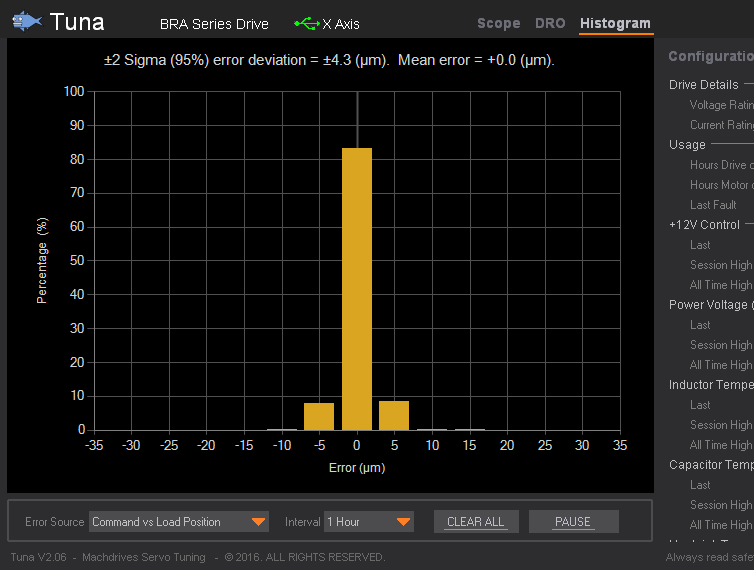
- Real-time statistical position error analysis.
- Silent, cool running operation.
- Exact position stop, no dithering or hunting.
- Intelligent limit switch support.
- Unlimited electronic gearing of encoder/step resolution.
- 20 LED indicators on I/O lines, power, status and alarms.
- Fully isolated control circuitry.
- Dual 32-Bit ARM CPUs.
- Latest design and control algorithms.
- Worldwide shipping. Money-back Guarantee.
- Designed and manufactured in Australia to IEC/EN 61800-5-1.



Downloads:
Dual Encoder Support
- Supports single or dual incremental encoder operation up to 2MHz count rate.
- Supports single ended or differential encoder types . True differential operation with RS485 standard line driver chips.
- All encoder inputs are isolated from power circuitry.
- User adjustable digital noise filtering.
- High efficiency DC-DC converter provides up to 250mA per encoder at 5V.
- Extremely high positional accuracy in dual encoder mode. Typical results are point-to-point positioning error < ±0.5 encoder counts and < ±1.5 encoder counts full trajectory tracking error at the tool, measured as per ISO 230-2 ±2 Sigma error deviation.
Advanced Control Algorithms
- Supports modified PI-D (PIV) algorithm for single encoder, and modified cascade algorithm for dual encoder.
- Dedicated 32 bit ARM control board CPU with double precision floating point motion calculations.
- Command velocity improvement with glitch filter, sliding filter and noise filter.
- Frequency and 1/T command velocity estimation with automatic transition.
- Velocity and acceleration feed forward with time shifting.
- Stiction and reversal compensation.
- Fast settle feature stops dead on exact encoder count without dithering or deadband.
- Supports all combinations of metric and imperial hardware. Automatic calculation of electronic gearing and step multiplying with no loss of precision.
- Abnormal condition detection like saturation, following error and encoder fault.
Easy Setup and Operation
- Standard step and direction input supports popular CNC programs like Mach3.
- All control signals are isolated from power circuitry.
- Easy drive commissioning with free Tuna software for Windows via USB.
- 20 LED indicators show all I/O states without multimeters or oscilloscopes.
- In-built waveform generator creates tuning waveforms such as trapezoid and S-profile.
- Easy parameter configuration. Real-time adjustment while tuning.
- Eight channel scope with pan and zoom for easy waveform analysis.
- Digital readouts on command, motor and load positions.
- Real time statistical position error analysis and charting over multiple time intervals.
- Assign drive axis names and connect multiple drives simultaneously.
Advanced Power Stage
- DC bus voltage from 20 to 150VDC. Under and over voltage monitoring and alarms. User adjustable current limit from 5 to 20A. Current limiting alert.
- High efficiency MOSFET bridge with low Rds ON resistance. Typical applications require no additional heatsink or cooling.
- Dedicated 32 bit ARM CPU for power stage.
- Silent operation. No singing or dithering.
- Optional power saving mode significantly reduces drive and motor losses with no effect on performance.
- High efficiency DC-DC converter supplies power stage with negligible losses and spread-spectrum frequency for reduced EMI.
Advanced Protection
- Dual di/dt output filter inductors reduce EMI and increase SOA under fault conditions.
- Four quadrant short circuit detection protects against motor to motor, motor to negative and motor to positive supply faults.
- Progressive overload protection shuts down within 0.4mS to 2 sec depending on severity of overload condition, while eliminating nuisance tripping.
- Snubber circuits across each MOSFET for reduce di/dt and switching stress. Additional snubbers on motor power rails.
- Independent thermal monitoring of heat sink, output inductors and main filter capacitors with audible warning and shutdown.
- Power stage is isolated from control circuitry and earth.
Limit/Home Switch Support
- Supports direct connection of mechanical switches or NPN inductive proximity switches.
- Supports normally open (NO) or normally closed (NC) operation.
- Limit switch inputs are isolated from power circuitry.
- Intelligent jogging off limits, but not into them.
- Homing off limit switches or combined with encoder index pulse for precise homing to within 1 encoder pulse.
- User adjustable digital noise filtering.
Stepper Drive
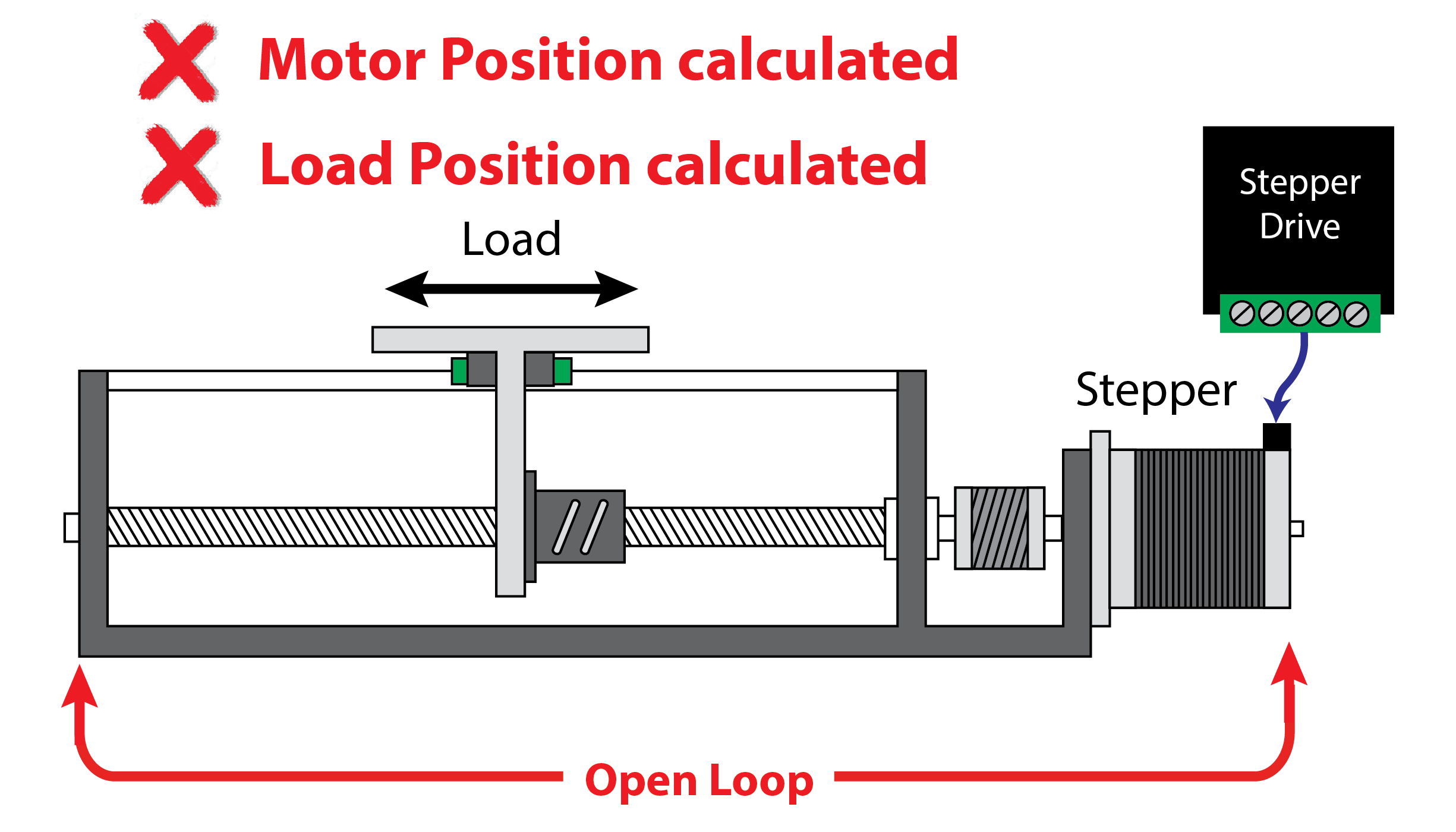
The entire system is open loop. Position error is made up of the following:
- Stepper motor construction accuracy.
- Missed steps.
- Loose wires, intermittent connection.
- EMI interference pickup.
- Coupling flex and slip.
- Thrust bearing deflection.
- Ballscrew/belt/rack pitch error.
- Ballscrew torsion/belt stretch.
- Ballnut play, pulley pitch error.
- Backlash.
- Drive train wear.
- Stiction, friction.
- Thermal expansion.
Servo Drive
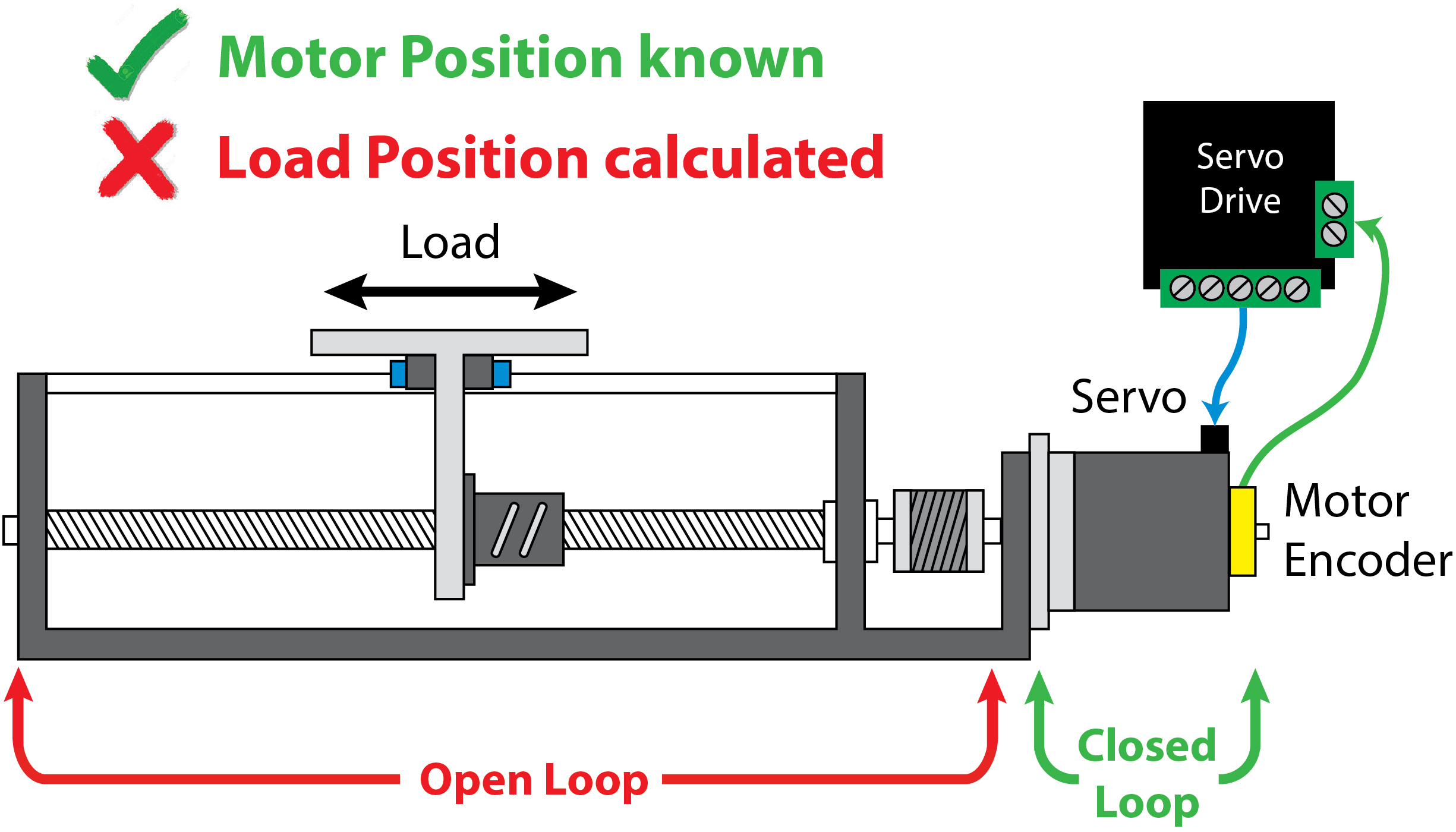
The motor position is closed loop. Drivetrain is open loop. Position error is made up of the following:
- Motor encoder accuracy.
- Coupling flex and slip.
- Thrust bearing deflection.
- Ballscrew/belt/rack pitch error.
- Ballscrew torsion/belt stretch.
- Ballnut play, pulley pitch error.
- Backlash.
- Drive train wear.
- Stiction, friction.
- Thermal expansion.
Dual Encoder Drive
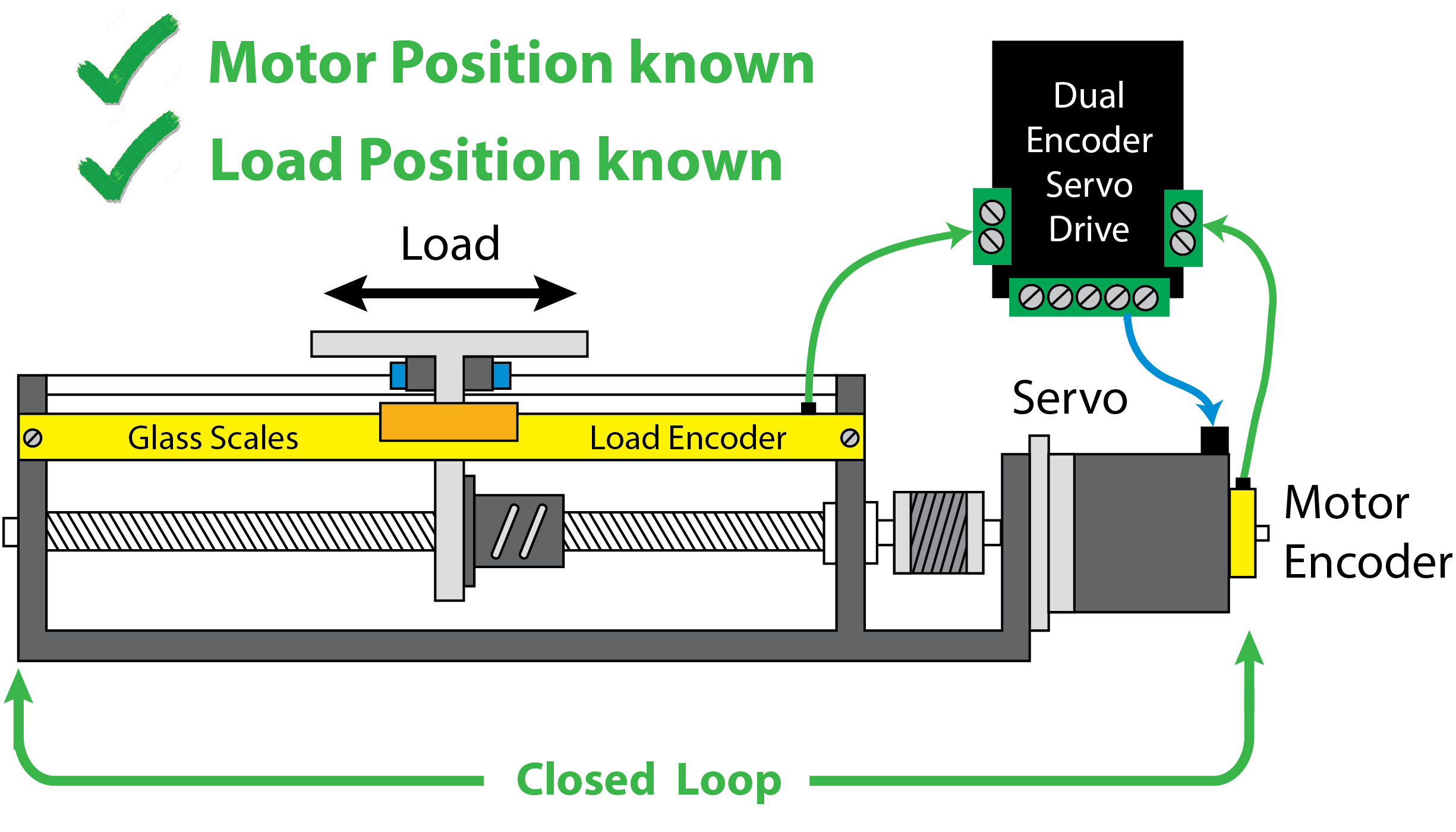
The entire system is closed loop. Position error is made up of the following:
- Glass scales accuracy.
Typical results are point-to-point positioning error < ±0.5 load encoder counts and < ±1.5 load encoder counts full trajectory tracking error at the tool, measured as per ISO 230-2 ±2 Sigma error deviation.